(image-segmentation:voronoi-otsu-labeling=)
Voronoi-Otsu标记#
这种图像分割工作流是一种相当简单但功能强大的方法,例如用于检测和分割荧光显微镜图像中的细胞核。细胞核标记物如核GFP、DAPI或组蛋白RFP与各种显微技术结合使用可以生成适当类型的图像。
from skimage.io import imread, imshow
import matplotlib.pyplot as plt
import pyclesperanto_prototype as cle
import napari_segment_blobs_and_things_with_membranes as nsbatwm
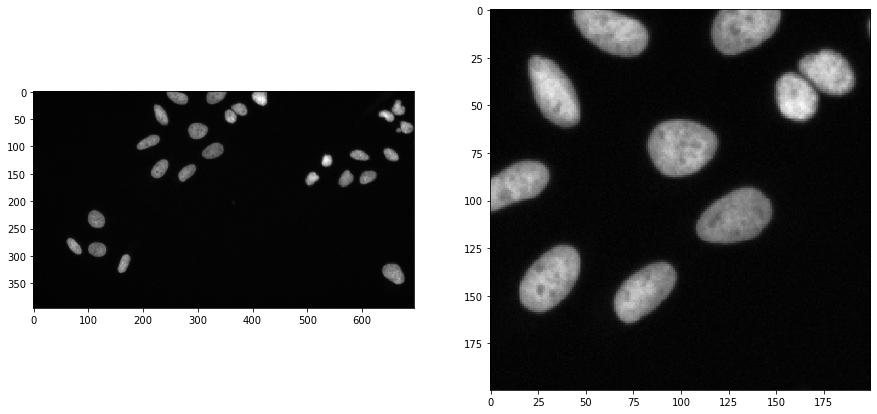
为了演示这个工作流程,我们使用来自Broad生物图像挑战的图像数据: 我们使用了图像集BBBC022v1 Gustafsdottir et al., PLOS ONE, 2013,该数据集可从Broad生物图像基准集合获得 Ljosa et al., Nature Methods, 2012。
input_image = imread("../../data/BBBC022/IXMtest_A02_s9.tif")[:,:,0]
input_crop = input_image[0:200, 200:400]
fig, axs = plt.subplots(1, 2, figsize=(15, 15))
cle.imshow(input_image, plot=axs[0])
cle.imshow(input_crop, plot=axs[1])
应用算法#
Voronoi-Otsu标记是clesperanto中的一个命令,需要两个sigma参数。第一个sigma控制检测到的细胞可以有多接近(spot_sigma),第二个控制分割对象的轮廓精确度(outline_sigma)。
sigma_spot_detection = 5
sigma_outline = 1
segmented = cle.voronoi_otsu_labeling(input_image, spot_sigma=sigma_spot_detection, outline_sigma=sigma_outline)
segmented_crop = segmented[0:200, 200:400]
fig, axs = plt.subplots(1, 2, figsize=(15, 15))
cle.imshow(segmented, labels=True, plot=axs[0])
cle.imshow(segmented_crop, labels=True, plot=axs[1])

它是如何工作的?#
Voronoi-Otsu标记工作流是高斯模糊、斑点检测、阈值处理和二值分水岭的组合。感兴趣的读者可以查看开源代码。这种方法类似于对二值图像应用种子分水岭,例如在MorphoLibJ或scikit-image中。然而,种子是自动计算的,不能传入。
为了演示目的,我们只在上面显示的2D裁剪图像上进行操作。如果将此算法应用于3D数据,建议首先使其等方。
image_to_segment = input_crop
print(image_to_segment.shape)
(200, 200)
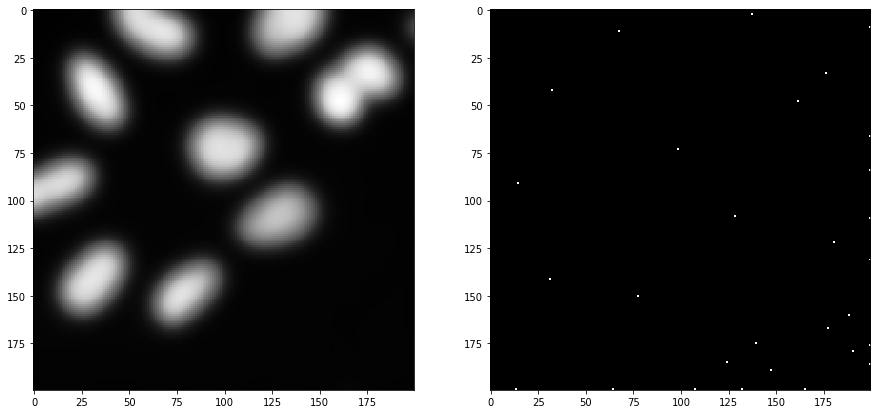
作为第一步,我们用给定的sigma对图像进行模糊处理,并在结果图像中检测最大值。
blurred = cle.gaussian_blur(image_to_segment, sigma_x=sigma_spot_detection, sigma_y=sigma_spot_detection, sigma_z=sigma_spot_detection)
detected_spots = cle.detect_maxima_box(blurred, radius_x=0, radius_y=0, radius_z=0)
number_of_spots = cle.sum_of_all_pixels(detected_spots)
print("检测到的斑点数量", number_of_spots)
fig, axs = plt.subplots(1, 2, figsize=(15, 15))
cle.imshow(blurred, plot=axs[0])
cle.imshow(detected_spots, plot=axs[1])
number of detected spots 29.0
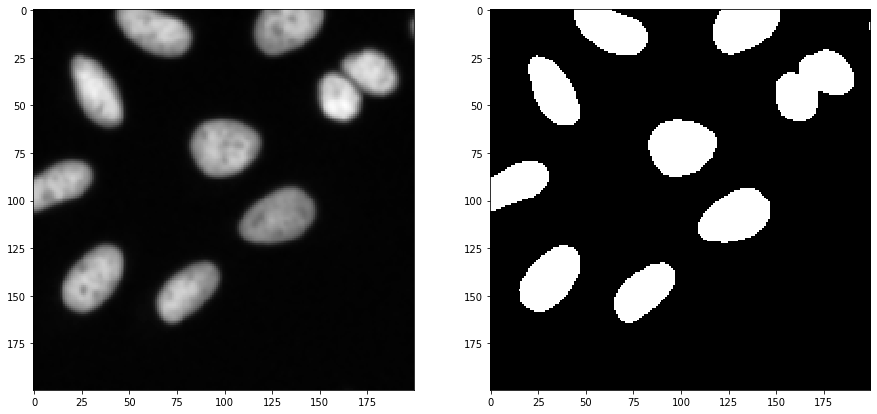
此外,我们再次从裁剪后的图像开始,用不同的sigma再次进行模糊处理。之后,我们使用大津阈值法(Otsu et al 1979)对图像进行阈值处理。
blurred = cle.gaussian_blur(image_to_segment, sigma_x=sigma_outline, sigma_y=sigma_outline, sigma_z=sigma_outline)
binary = cle.threshold_otsu(blurred)
fig, axs = plt.subplots(1, 2, figsize=(15, 15))
cle.imshow(blurred, plot=axs[0])
cle.imshow(binary, plot=axs[1])
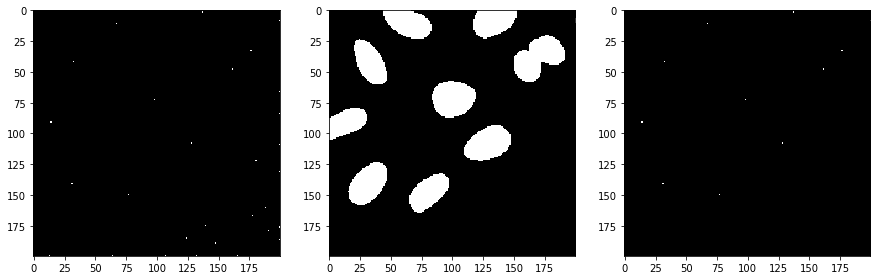
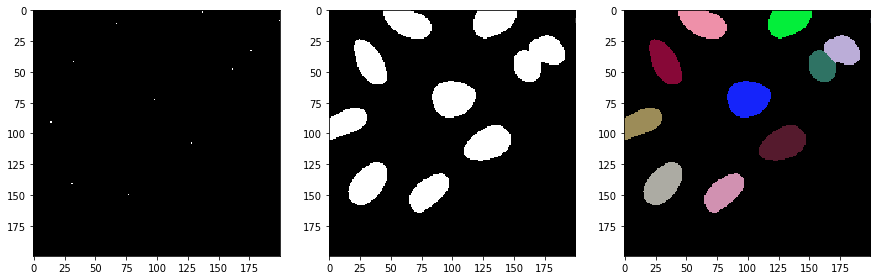
之后,我们取二值斑点图像和二值分割图像,应用binary_and操作以排除在背景区域检测到的斑点。这些可能对应于噪声。
selected_spots = cle.binary_and(binary, detected_spots)
number_of_spots = cle.sum_of_all_pixels(selected_spots)
print("选中的斑点数量", number_of_spots)
fig, axs = plt.subplots(1, 3, figsize=(15, 15))
cle.imshow(detected_spots, plot=axs[0])
cle.imshow(binary, plot=axs[1])
cle.imshow(selected_spots, plot=axs[2])
number of selected spots 11.0
接下来,我们使用Voronoi图在选定的斑点之间分割图像空间,该图限制在二值图像的正像素中。
voronoi_diagram = cle.masked_voronoi_labeling(selected_spots, binary)
fig, axs = plt.subplots(1, 3, figsize=(15, 15))
cle.imshow(selected_spots, plot=axs[0])
cle.imshow(binary, plot=axs[1])
cle.imshow(voronoi_diagram, labels=True, plot=axs[2])
其他Voronoi-Otsu标记实现#
在可脚本化的napari插件napari-segment-blobs-and-things-with-membranes中有该算法的另一种实现。
这里的代码与上面的代码几乎相同。主要区别在于我们调用nsbatwm.voronoi_otsu_labeling()而不是cle.voronoi_otsu_labeling()。
sigma_spot_detection = 5
sigma_outline = 1
segmented2 = nsbatwm.voronoi_otsu_labeling(input_image, spot_sigma=sigma_spot_detection, outline_sigma=sigma_outline)
segmented_crop2 = segmented2[0:200, 200:400]
fig, axs = plt.subplots(1, 2, figsize=(15, 15))
cle.imshow(segmented2, labels=True, plot=axs[0])
cle.imshow(segmented_crop2, labels=True, plot=axs[1])
